视觉智能
Visual Intelligence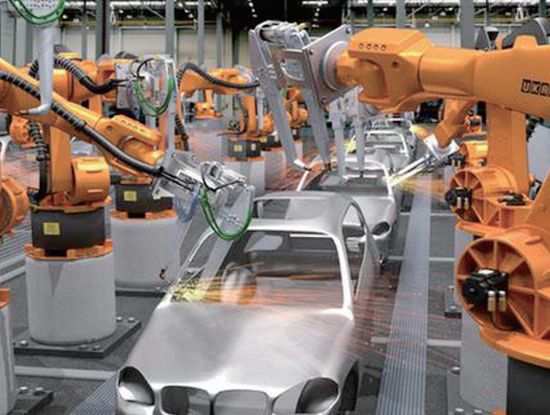
 |
为实现客车车身的精确、完美焊接,本公司研制了基于视觉引导的智能汽车自动定位、柔性焊接系统,焊接步骤如下:
1、系统启动,机器人、视觉器件、控制部分初始化完成;
2、位置传感器检测到客车车身到位,触发各个方向的3D传感器实时拍摄车身关键特征空间位置;
3、关键表面特征提取,精确计算安装于机器人前端焊枪与客车车身之间的空间位置关系;
4、在机器人初始移动轨迹的基础上,实时修正补偿焊接路线(包括X、Y、Z空间各个方向),最终实现客车车身的自动定位、柔性抓取与焊接。
|
技术指标

电话: 0512-66180896
邮箱: institute@jitrimnai.com
邮编: 215000
地址: 江苏省苏州市相城区高铁新城青龙港路286号长三角国际研发社区启动区10C幢


