Micro Instrument
Instrument
Case
Software Function
Parameter
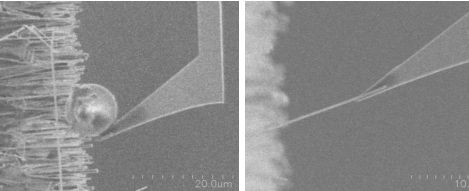 |
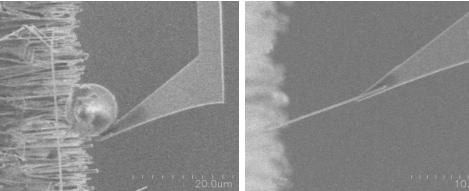
MECHANICAL CHARACTERIZATIONS LifeForce provides high resolution force and dis-placement feedback for Reliable mechanical charac-terization feedback for reliable mechanical Charac-terization of nanomaterials. Example images show nanoindentation of silicon nanowire forst with a ball ended AFM cantilever,and tensile testing of a single nanowire. |
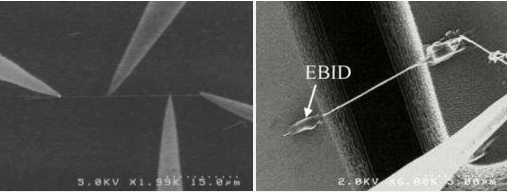
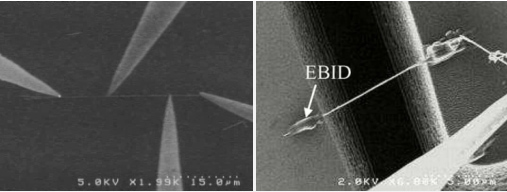
| ELECTRICAL CHARACTERIZATIONS LifeForce provides reliable,low noise electrical measurements of micro-nano materials;and in situ interactions with nano structures. Example images show 4-point probing and pizoresistivity testing of nanowires. |
 |
 |
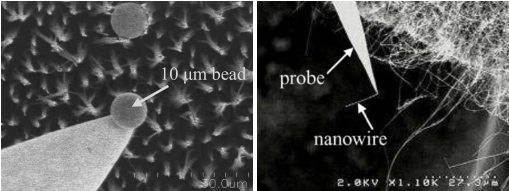
PICK-AND-PLACE
Using end-tools (e.g.,probes,micro-nanogrippers,ultrasonic cutters), operator can operate LifeForce to push,pull,grasp,cut various micro-nano objects inside SEM.
|
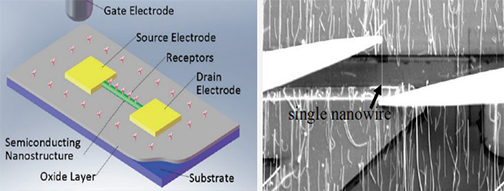
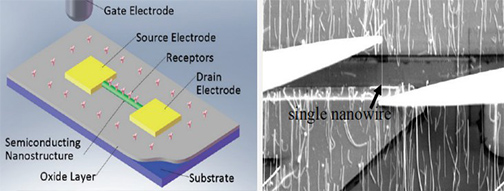
| DEVICE PROTOTYPING Precise manipulator movements enable rapid prototyping or post processing of micro-nano dvices. Example image shows the construc-tion of nanowire FET sensors. |
 |
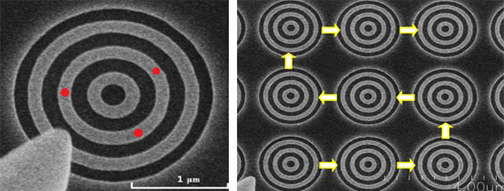 |
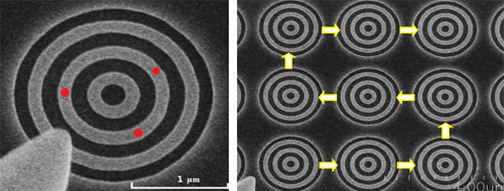
NANOELECTRONICES PROBING
LifeForce is the only commercially available system that allows automated probing of electronic structures,ranging from sub-micromenters,sub--100nm,and sub-20nm,Positioning probes onto target locations is via computer mouse clicking.Exteremely low drift warrants reliable data collection.
|
| Position feedback | Provide XYZ precise position feedback for each manipulator, with 1 nm motion positioning resolution. |
| Save / load coordinates | Save and load the coordinates of multiple manipulators. |
| Automatic calibration | Maximizes positioning performance,and align manipulator motion axes to SEM image axes. |
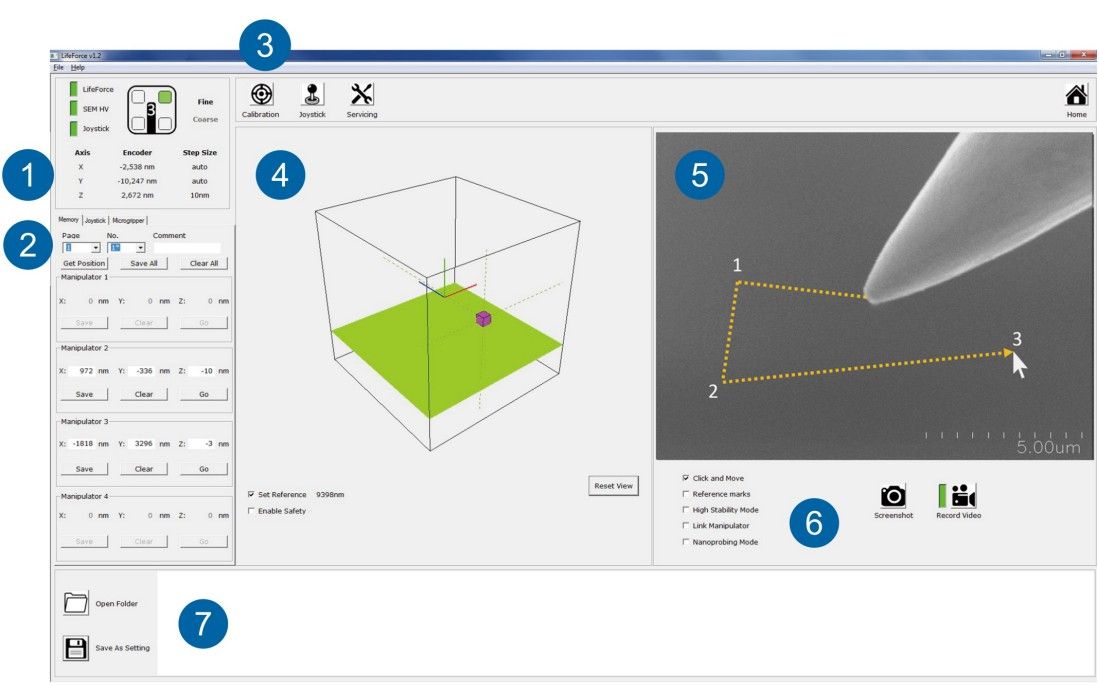
| 3D virtual display | Real-time 3D virtual space showing the manipulator(pink square)and sample(green plance)locations. |
| Click Move | On-screen mouse cliking to control manipulator movements. |
| Multi manipulator linkage | Link the motions of multiple manipulators with nanometer precision. |
| Picture video recording | Save pictures and videos of manipulation process high definitions. |
| System overview | System size | 127X127X33 mm³* |
| Number of manipulators | 1-4 | |
| Operator (macro) | Driving principle | Viscous drive |
| Range of motion | XY axis:10mm Z axis:5mm | |
| Maximum speed | >3mm/s | |
| Minimum step size | <100nm | |
| Operator (inching) | Driving principle | Frictionless flexure hinge |
| Range of motion | XYZ axis:20μm | |
| Maximum speed | >45μm/s | |
| Open loop motion resolution | 0.5nm | |
| Closed loop motion resolution | 1nm | |
| Positioning drift rate | <0.35nm/min | |
| Software function** | Click Move | Move the mouse from a to B on the computer screen |
| Adaptive magnification | Positioner movement speed automatically adjusteding to SEM mangnification | |
| Manipulator position saving / loading | User defined "save / load" manipulator coordinates | |
| 3D virtual display | Real time three-dimensional display of the position and motion of the manipulator | |
| Automatic calibration | automated manipulator sensor calibration | |
| auto alignment of motion axes | all manipulator motion axes auto aligned to SEM image axes |
M/T: 0512-66180896
Email: institute@jitrimnai.com
P.C.: 215000
ADD: 10 / F, building B, No. 1, No. 286, qinglonggang Road, Yangtze River Delta International R & D community launching area, high speed rail new town, Xiangcheng District, Suzhou City, Jiangsu Province


