3D Visual
Visual
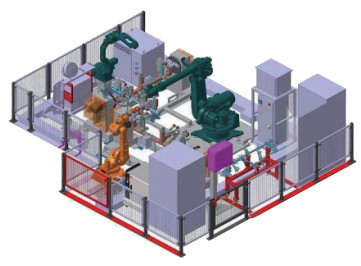 |
In order to realize accurate and perfect welding of bus body, the company has developed an intelligent vehicle automatic positioning and flexible welding system based on visual guidance. The welding steps are as follows:
1. The system is started, and the initialization of robot, vision device and control part is completed;
2. The position sensor detects that the bus body is in place and triggers 3D sensors in all directions to capture the spatial position of key features of the bus body in real time;
3. The key surface features are extracted to accurately calculate the spatial position relationship between the welding gun installed at the front end of the robot and the bus body;
4. Based on the initial movement trajectory of the robot, the compensation welding route (including all directions of X, y and Z space) is corrected in real time, and finally the automatic positioning, flexible grasping and welding of bus body are realized.
|
Technical indicators

M/T: 0512-66180896
Email: institute@jitrimnai.com
P.C.: 215000
ADD: 10 / F, building B, No. 1, No. 286, qinglonggang Road, Yangtze River Delta International R & D community launching area, high speed rail new town, Xiangcheng District, Suzhou City, Jiangsu Province


